无机材料学报 ›› 2026, Vol. 41 ›› Issue (5): 619-627.DOI: 10.15541/jim20250286 CSTR: 32189.14.jim20250286
曹颖1,2( ), 彭露1, 夏双1,2, 白菊1, 张珽1,2(), 李铁1,2()
), 彭露1, 夏双1,2, 白菊1, 张珽1,2(), 李铁1,2()
收稿日期:2025-07-08
修回日期:2025-10-21
出版日期:2026-05-20
网络出版日期:2025-11-11
通讯作者:
张 珽, 研究员. E-mail: tzhang2009@sinano.ac.cn;作者简介:曹 颖(2001-), 女, 硕士研究生. E-mail: cy13897985409@mail.ustc.edu.cn
基金资助:
CAO Ying1,2(), PENG Lu1, XIA Shuang1,2, BAI Ju1, ZHANG Ting1,2(), LI Tie1,2()
Received:2025-07-08
Revised:2025-10-21
Published:2026-05-20
Online:2025-11-11
Contact:
ZHANG Ting, professor. E-mail: tzhang2009@sinano.ac.cn;About author:CAO Ying (2001-), female, Master candidate. E-mail: cy13897985409@mail.ustc.edu.cn
Supported by:摘要:
随着仿生人形机器人等智能装备的快速发展, 具有仿人手指触感功能的柔性触觉传感器技术受到广泛关注。然而, 现有多模态柔性触觉传感器所用敏感材料缺乏选择性响应能力, 导致其所输出信号易产生相互交叉干扰的现象, 难以满足系统轻量化、集成化的发展需求。基于此, 本研究设计并制备了一种新型聚氨酯-碳纳米管@碲化铋(WPU-CNT@Bi2Te3)复合气凝胶敏感材料, 通过组分比例优化, 其最大压缩应变可达60%、压缩强度为9.4 kPa。CNT的压阻效应可实现对机械压力刺激的响应, 而Bi2Te3的热电效应则能够快速响应外界温度的变化。基于这两种独立感知机制, 本研究构建的柔性触觉传感器实现了对压力与温度的高灵敏感知(压力灵敏度系数(GF)为-1.28 kPa-1, 温度响应灵敏度为1.2 K-1, 最小感知温差为0.4 K), 具有快速(压阻响应时间为0.14 s、恢复时间为0.18 s, 温度响应时间最快为0.28 s)、高稳定(1300次热循环输出值不衰减)且互不干扰的响应能力, 并赋予了所集成机械手对物体软硬及温度等性质的感知功能。
中图分类号:
曹颖, 彭露, 夏双, 白菊, 张珽, 李铁. 聚氨酯-碳纳米管@碲化铋复合气凝胶的制备及传感性能[J]. 无机材料学报, 2026, 41(5): 619-627.
CAO Ying, PENG Lu, XIA Shuang, BAI Ju, ZHANG Ting, LI Tie. Polyurethane-carbon Nanotubes@Bismuth Telluride Hybrid Aerogel: Preparation and Sensing Properties[J]. Journal of Inorganic Materials, 2026, 41(5): 619-627.
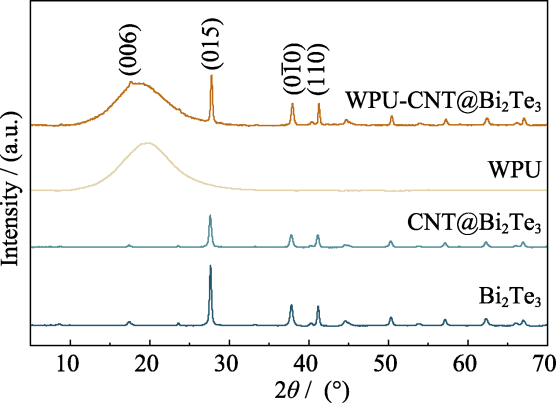
图1 WPU、Bi2Te3、CNT@Bi2Te3及WPU-CNT@Bi2Te3的XRD图谱
Fig. 1 XRD patterns of WPU, Bi2Te3, CNT@Bi2Te3 and WPU-CNT@Bi2Te3
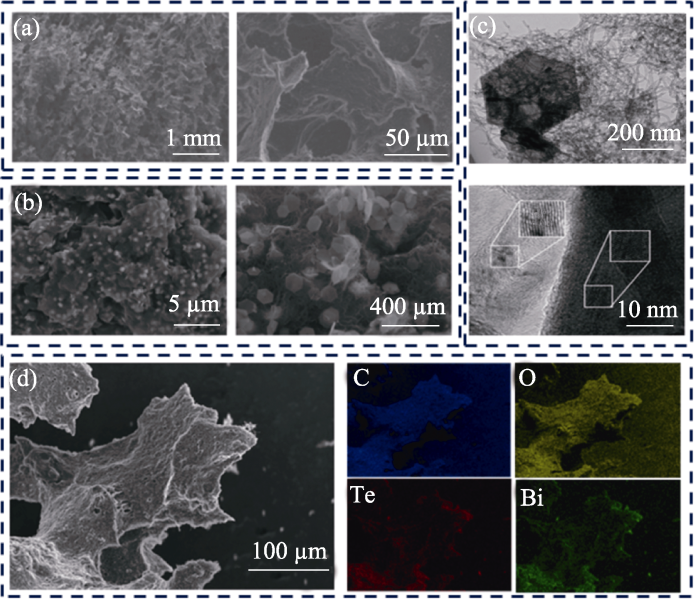
图2 WPU-CNT@Bi2Te3气凝胶的微观形貌结构及元素分布
Fig. 2 Microscopic morphology, structure and elemental distribution of the WPU-CNT@Bi2Te3 aerogel (a, b) SEM images of the microscopic porous morphology of the aerogel; (c) TEM images of the crystal structure of CNT@Bi2Te3 in the hybrid; (d) Elemental distribution mappings of C, O, Te and Bi in the aerogel
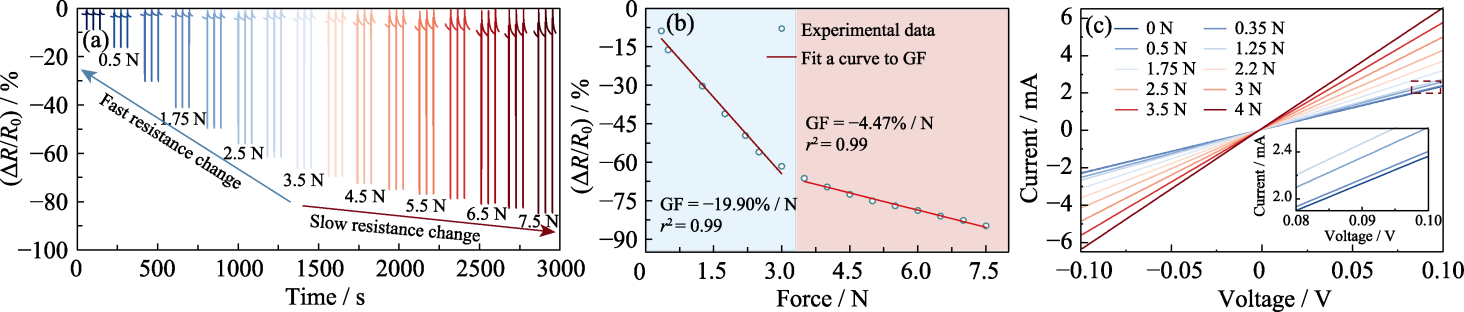
图3 基于WPU-CNT@Bi2Te3气凝胶的柔性触觉传感器的静态压力响应性能
Fig. 3 Static pressure response performance of the WPU-CNT@Bi2Te3 aerogel derived flexible tactile sensor (a) Resistance changing rates of the flexible tactile sensor under different pressures; (b) Corresponding response sensitivity of the flexible sensor; (c) I-V response curves of the flexible device under different pressures. Colorful figures are available on website
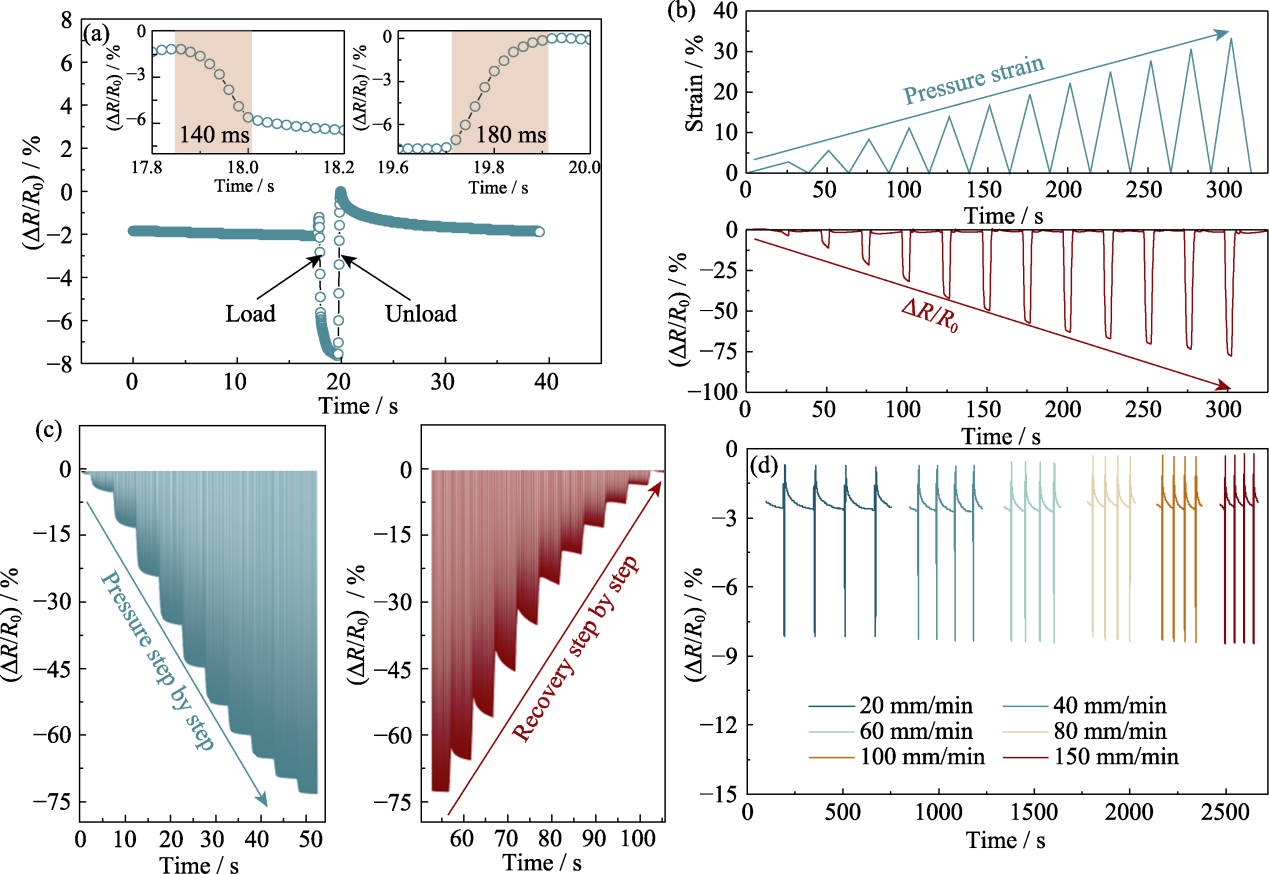
图4 基于WPU-CNT@Bi2Te3气凝胶的柔性触觉传感器的动态压力响应性能
Fig. 4 Dynamic pressure response performance of the WPU-CNT@Bi2Te3 aerogel derived flexible tactile sensor (a) Response and recovery time; (b) Relationship between strain and resistance changing rate; (c) Resistance changing rates under the stepwise compression-recovery gradient test; (d) Influence of compression rate on the resistance variation. Colorful figures are available on website
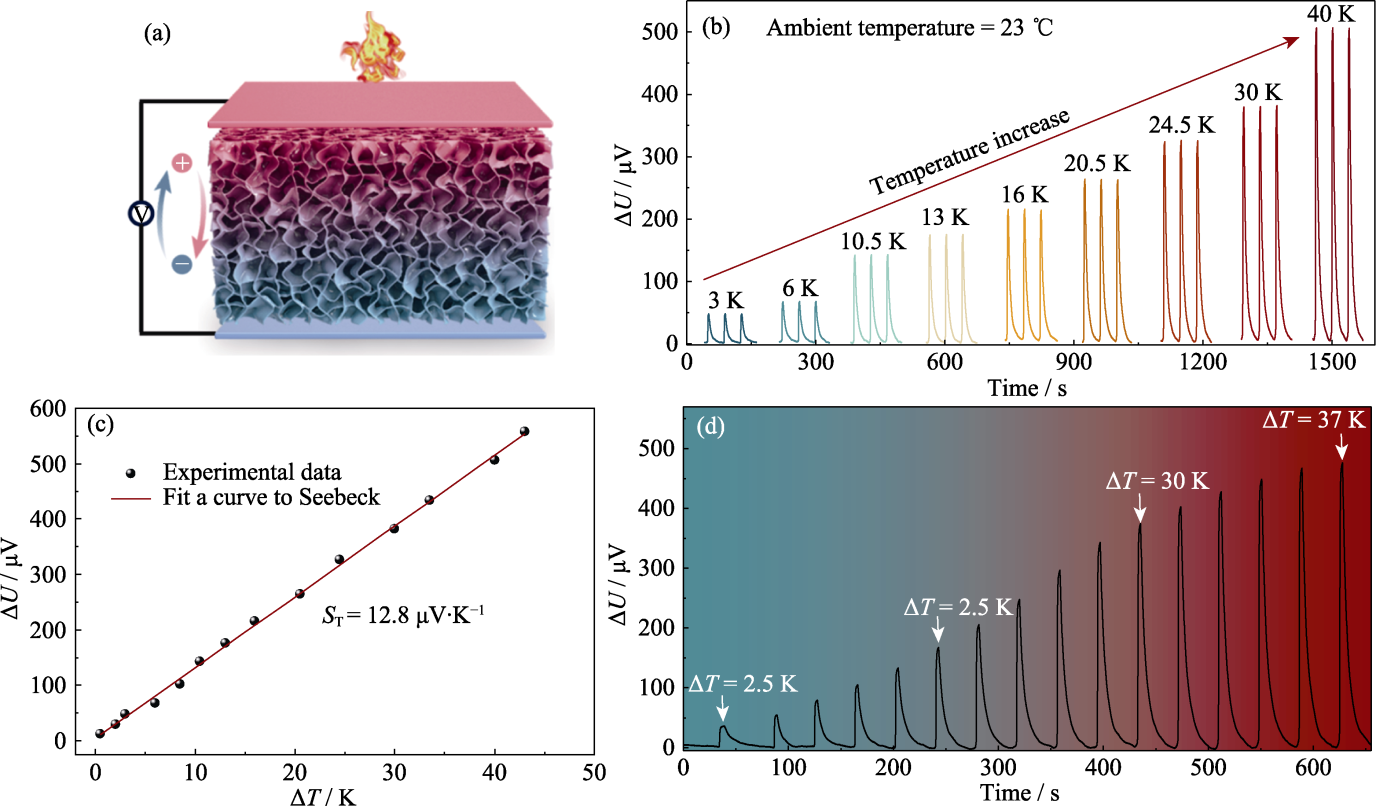
图5 基于WPU-CNT@Bi2Te3气凝胶的柔性触觉传感器的温度响应原理及基本性能
Fig. 5 Schematic diagram and basic response performance of the WPU-CNT@Bi2Te3 aerogel derived flexible tactile sensor for temperature variations (a) Schematic diagram of the temperature-response output; (b) Thermoelectric output voltages under different temperature differences; (c) Seebeck coefficient fitting result; (d) Thermoelectric output voltages during the dynamic process of continuous heating and cooling
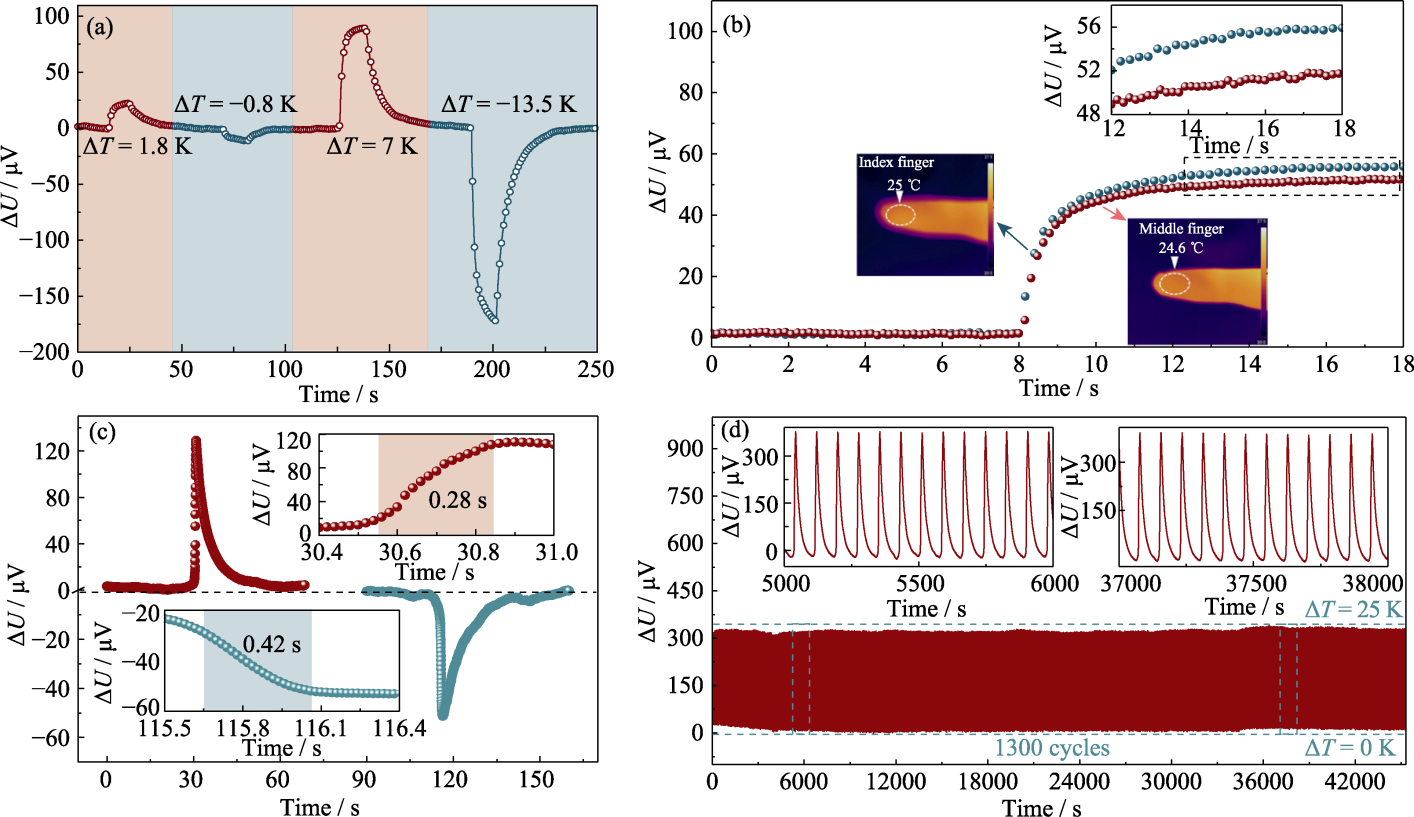
图6 基于WPU-CNT@Bi2Te3气凝胶的柔性触觉传感器的温度动态区分性响应及稳定性能
Fig. 6 Dynamic temperature discriminatory response and stability of the WPU-CNT@Bi2Te3 aerogel derived flexible tactile sensor (a) Dynamic discriminatory response behavior and (b) response time to positive and negative temperature differences; (c) Response results to the tiny temperature difference between the sensor and the fingers; (d) Response stability of the sensor under 1300 thermal cycles. Colorful figures are available on website
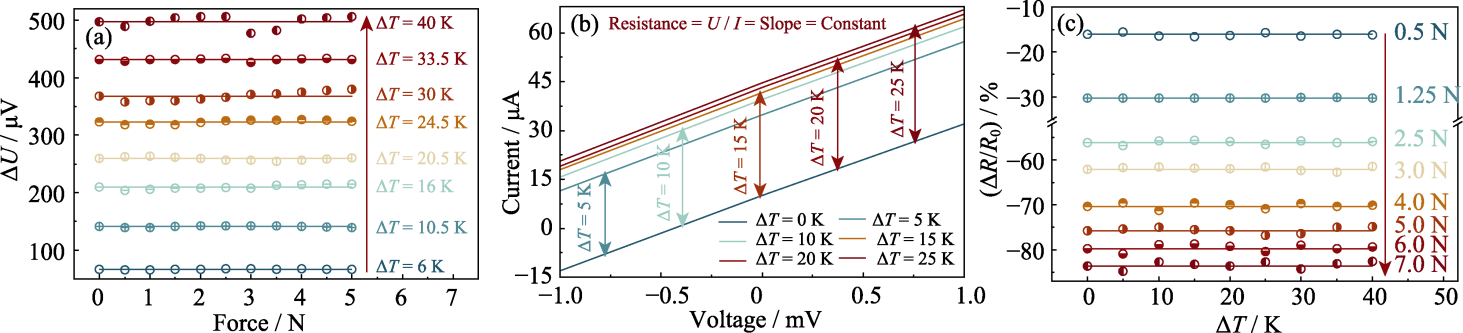
图7 柔性触觉传感器的压力与温度响应互不干扰特性
Fig. 7 Non-interference characteristics of the flexible sensor regarding to the pressure and temperature response behaviors (a) Influence of compression deformation on the temperature response behavior; (b) I-V curves under the same pressure (3 N) with different temperature differences; (c) Influence of temperature difference on the pressure response behavior. Colorful figures are available on website
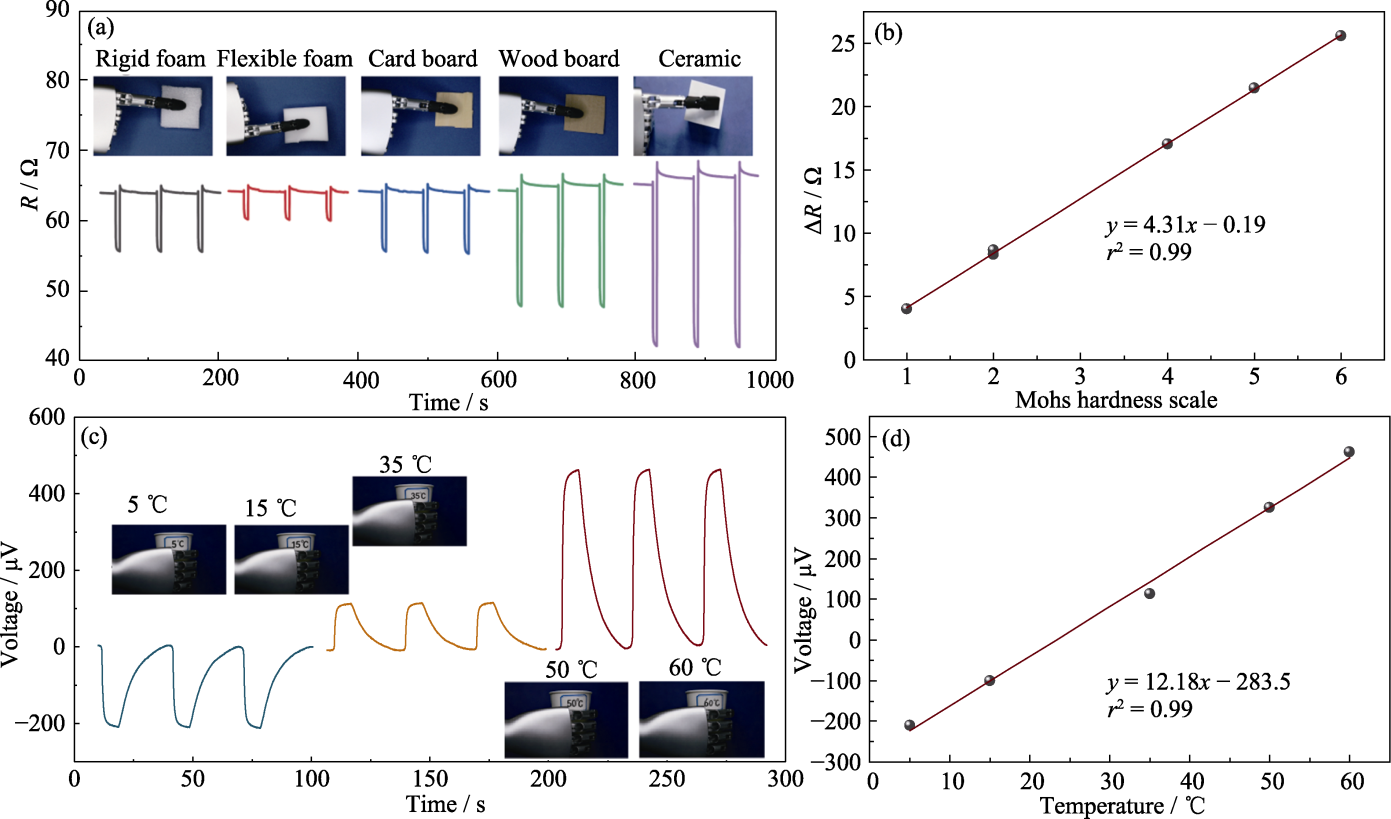
图8 集成柔性触觉传感器的机械手用于物体性质感知
Fig. 8 Practical performance of a robotic hand integrated with flexible sensor applied to recognize the properties of objects (a) Piezoresistive outputs for objects with different hardness and (b) corresponding linear relationship of hardnesses and outputs; (c) Thermoelectric voltages of water cups with different temperatures and (d) corresponding linear relationship of temperatures and outputs
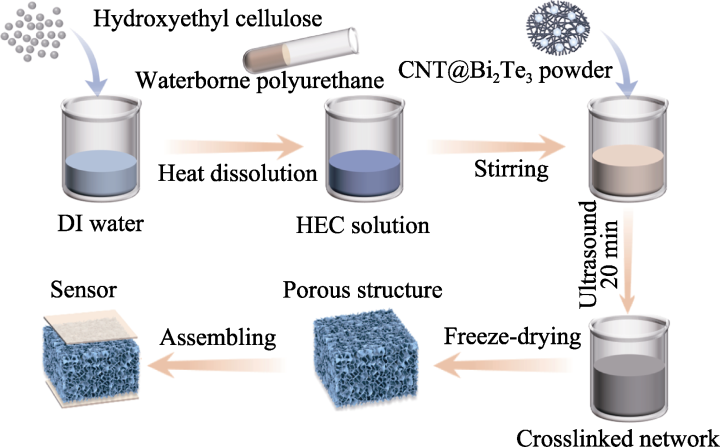
图S1 WPU-CNT@Bi2Te3气凝胶材料的制备工艺流程图
Fig. S1 Preparation process flow chart of the WPU-CNT@Bi2Te3 aerogel
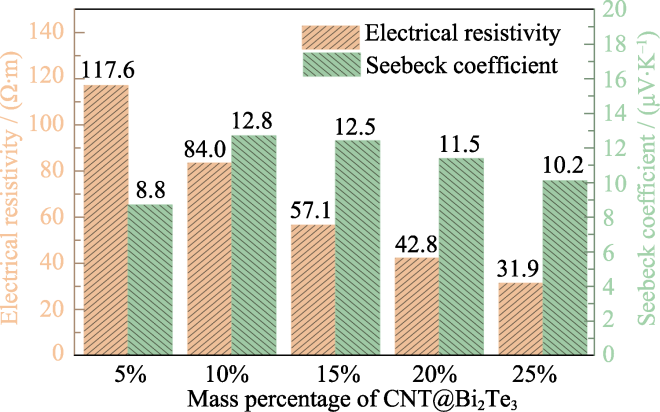
图S2 不同CNT@Bi2Te3质量分数气凝胶的电阻率与塞贝克系数
Fig. S2 Electrical resistivities and Seebeck coefficients of aerogels with different mass percentages of CNT@Bi2Te3
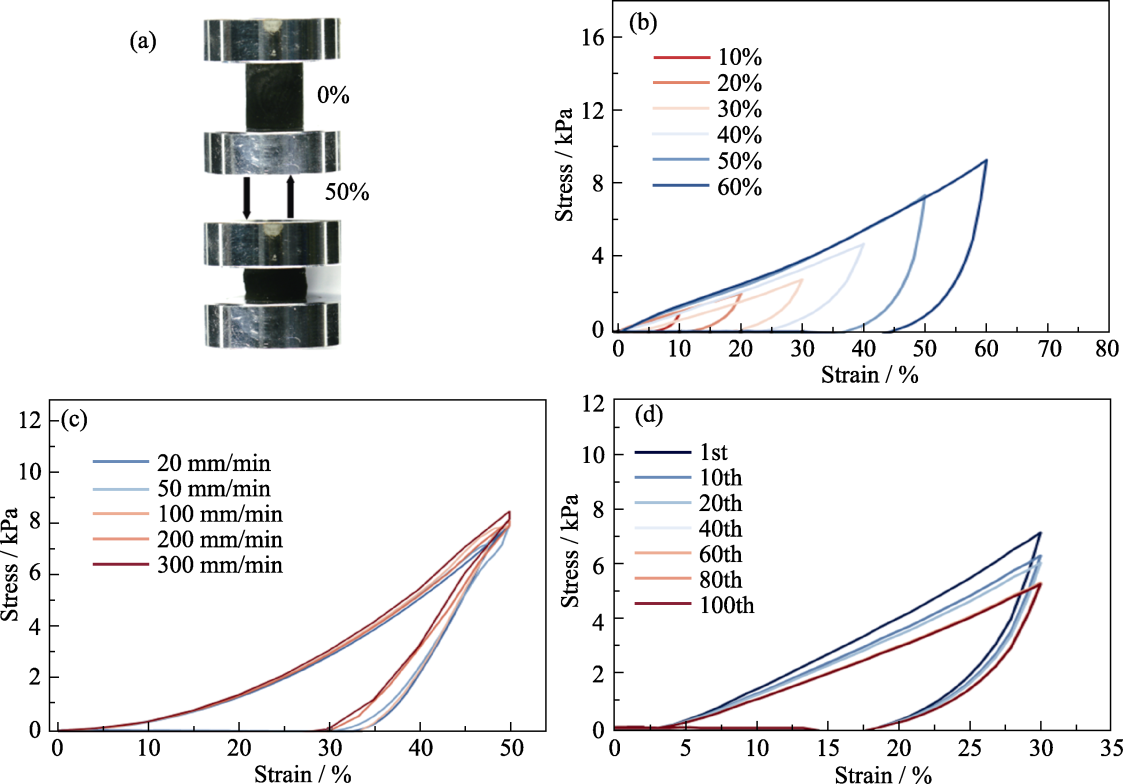
图S3 WPU-CNT@Bi2Te3气凝胶的压缩力学性能
Fig. S3 Compression performance of WPU-CNT@Bi2Te3 aerogel (a) Optical image of practical recovering status under a strain of 50%; Stress-strain behaviors under (b) various compression strains of 10%-60% and (c) different compression speeds of 20-300 mm/min; (d) Cyclic test under a strain of 30%
| Sensitive material system | Sensor device structure | Multifunctional parameters | Sensing mechanism | Decoupling capability | Integration difficulty/Cost | Pressure sensitivity | Temperature sensitivity | Ref. |
|---|---|---|---|---|---|---|---|---|
| WPU-CNT@Bi2Te3 | Aerogel monolith | Temperature, pressure | Thermoelectric piezoresistive | √ | √ General | -19.9%/N (1.28 kPa-1) | 12.8 μV/K (1.2 K-1) | This work |
| Ag nanoparticle/PDMS | Aerogel monolith | Temperature, pressure | Thermoelectric | × | × Relatively high | \ | 0.0017 K-1 | [ |
| MWCNTs | Conventional membrane | Temperature, pressure | Thermoelectric piezoresistive | √ | × General | 0.74 kPa-1 | 0.95 K-1 | [ |
| PEDOT: PSS | Aerogel monolith | Temperature, pressure | Thermoelectric piezoresistive | √ | × General | 28.9 kPa-1 | <0.1 K-1 | [ |
| PTFE | Conventional membrane | Pressure | Triboelectric | × | √ General | \ | \ | [ |
| PEDOT:PSS/CNT | Conventional membrane | Static pressure, dynamic pressure | Triboelectric piezoresistive | × | × Relatively high | 291699.6 kPa-1 | \ | [ |
| Liquid metal | Conventional membrane | Static pressure, dynamic pressure | Triboelectric | × | × Relatively high | \ | \ | [ |
| GO-PDMS/PTFE | Conventional monolith | Temperature, pressure | Triboelectric piezoresistive | √ | × General | 15.22 kPa-1 | 1 K-1 | [ |
| Ag nanowires | Conventional membrane | Temperature, pressure | Thermal conductivity piezoresistive | × | × Relatively high | \ | 0.05 K-1 | [ |
| PDMS/liquid metal/NdFeB | Conventional monolith | Non-contact pressure | Magnetoelastic piezoresistive | √ | × Relatively high | 0.27 kPa-1 | \ | [ |
| PDMS/ionic liquid | Conventional membrane | Non-contact pressure | Piezoresistive capacitance | √ | × Relatively high | 0.93 kPa-1 | \ | [ |
表S1 基于WPU-CNT@Bi2Te3气凝胶柔性触觉传感器与文献报道传感器性能对比
Table S1 Comparison of performance between WPU-CNT@Bi2Te3 aerogel-based flexible tactile sensor and relevant studies
| Sensitive material system | Sensor device structure | Multifunctional parameters | Sensing mechanism | Decoupling capability | Integration difficulty/Cost | Pressure sensitivity | Temperature sensitivity | Ref. |
|---|---|---|---|---|---|---|---|---|
| WPU-CNT@Bi2Te3 | Aerogel monolith | Temperature, pressure | Thermoelectric piezoresistive | √ | √ General | -19.9%/N (1.28 kPa-1) | 12.8 μV/K (1.2 K-1) | This work |
| Ag nanoparticle/PDMS | Aerogel monolith | Temperature, pressure | Thermoelectric | × | × Relatively high | \ | 0.0017 K-1 | [ |
| MWCNTs | Conventional membrane | Temperature, pressure | Thermoelectric piezoresistive | √ | × General | 0.74 kPa-1 | 0.95 K-1 | [ |
| PEDOT: PSS | Aerogel monolith | Temperature, pressure | Thermoelectric piezoresistive | √ | × General | 28.9 kPa-1 | <0.1 K-1 | [ |
| PTFE | Conventional membrane | Pressure | Triboelectric | × | √ General | \ | \ | [ |
| PEDOT:PSS/CNT | Conventional membrane | Static pressure, dynamic pressure | Triboelectric piezoresistive | × | × Relatively high | 291699.6 kPa-1 | \ | [ |
| Liquid metal | Conventional membrane | Static pressure, dynamic pressure | Triboelectric | × | × Relatively high | \ | \ | [ |
| GO-PDMS/PTFE | Conventional monolith | Temperature, pressure | Triboelectric piezoresistive | √ | × General | 15.22 kPa-1 | 1 K-1 | [ |
| Ag nanowires | Conventional membrane | Temperature, pressure | Thermal conductivity piezoresistive | × | × Relatively high | \ | 0.05 K-1 | [ |
| PDMS/liquid metal/NdFeB | Conventional monolith | Non-contact pressure | Magnetoelastic piezoresistive | √ | × Relatively high | 0.27 kPa-1 | \ | [ |
| PDMS/ionic liquid | Conventional membrane | Non-contact pressure | Piezoresistive capacitance | √ | × Relatively high | 0.93 kPa-1 | \ | [ |
| [1] | QU X C, LIU Z, TAN P C, et al. Artificial tactile perception smart finger for material identification based on triboelectric sensing. Sci. Adv., 2022, 8(31): eabq2521. |
| [2] |
JUNG Y H, PARK B, KIM J U, et al. Bioinspired electronics for artificial sensory systems. Adv. Mater., 2019, 31(34): 1803637.
DOI URL |
| [3] | PANG K, SONG X, XU Z, et al. Hydroplastic foaming of graphene aerogels and artificially intelligent tactile sensors. Sci. Adv., 2020, 6(46): eabd4045. |
| [4] |
WANG C, QU X C, ZHENG Q, et al. Stretchable, self-healing, and skin-mounted active sensor for multipoint muscle function assessment. ACS Nano, 2021, 15(6): 10130.
DOI PMID |
| [5] |
YANG J H, SHI R L, LOU Z, et al. Flexible smart noncontact control systems with ultrasensitive humidity sensors. Small, 2019, 15(38): 1902801.
DOI URL |
| [6] |
LEE J H, KIM E, ZHANG H, et al. Rational design of all resistive multifunctional sensors with stimulus discriminability. Adv. Funct. Mater., 2022, 32(1): 2107570.
DOI URL |
| [7] |
YIN Y M, WANG Y L, LI H Y, et al. A flexible dual parameter sensor with hierarchical porous structure for fully decoupled pressure-temperature sensing. Chem. Eng. J., 2022, 430: 133158.
DOI URL |
| [8] |
JUNG D, KIM Y, LEE H, et al. Metal-like stretchable nanocomposite using locally-bundled nanowires for skin- mountable devices. Adv. Mater., 2023, 35(44): 2303458.
DOI URL |
| [9] | PENG X, DONG K, YE C Y, et al. A breathable, biodegradable, antibacterial, and self-powered electronic skin based on all-nanofiber triboelectric nanogenerators. Sci. Adv., 2020, 6(26): eaba9624. |
| [10] |
MCKEMY D D, NEUHAUSSER W M, JULIUS D. Identification of a cold receptor reveals a general role for TRP channels in thermosensation. Nature, 2002, 416(6876): 52.
DOI |
| [11] |
WANG S, WANG X Y, WANG Q, et al. Flexible optoelectronic multimodal proximity/pressure/temperature sensors with low signal interference. Adv. Mater., 2023, 35(49): 2304701.
DOI URL |
| [12] |
KIM J, SHIM H J, YANG J, et al. Ultrathin quantum dot display integrated with wearable electronics. Adv. Mater., 2017, 29(38): 1700217.
DOI URL |
| [13] | MAHATO K, SAHA T, DING S C, et al. Hybrid multimodal wearable sensors for comprehensive health monitoring. Nat. Electron., 2024, 7: 2520. |
| [14] |
HENG W Z, SOLOMON S, GAO W. Flexible electronics and devices as human-machine interfaces for medical robotics. Adv. Mater., 2022, 34(16): 2107902.
DOI URL |
| [15] | LI G Z, LIU S Q, WANG L Q, et al. Skin-inspired quadruple tactile sensors integrated on a robot hand enable object recognition. Sci. Rob., 2020, 5(49): eabc8134. |
| [16] |
QIU Y, WANG Z Q, ZHU P C, et al. A multisensory-feedback tactile glove with dense coverage of sensing arrays for object recognition. Chem. Eng. J., 2023, 455: 140890.
DOI URL |
| [17] |
吕晓洲, 卢文科. 用于电子皮肤的界面应力传感器的研究. 电子学报, 2013, 41(2): 340.
DOI |
| [18] |
XU Y C, PAZ D E, PAUL A, et al. In-ear integrated sensor array for the continuous monitoring of brain activity and of lactate in sweat. Nat. Biomed. Eng., 2023, 7(10): 1307.
DOI |
| [19] |
PARK J, KIM M, LEE Y, et al. Fingertip skin-inspired microstructured ferroelectric skins discriminate static/dynamic pressure and temperature stimuli. Sci. Adv., 2015, 1(9): e1500661.
DOI URL |
| [20] |
LIU W B, DUO Y N, LIU J Q, et al. Touchless interactive teaching of soft robots through flexible bimodal sensory interfaces. Nat. Commun., 2022, 13: 5030.
DOI |
| [21] |
WEI X L, WANG B C, WU Z Y, et al. An open-environment tactile, sensing system: toward simple and efficient material identification. Adv. Mater., 2022, 34(29): 2203073.
DOI URL |
| [22] | 曹晓鹏, 贾文博, 陆晓伟, 等. 基于碲化铋纳米线的长波红外光热电探测器. 半导体技术, 2023, 48(12): 1084. |
| [23] |
VEERAPANDIAN S, LUO J C, KWAK M, et al. Two-terminal deformable induction array sensor capable of recognizing non-contact dynamic motions of various objects. Adv. Funct. Mater., 2024, 34(31): 2305776.
DOI URL |
| [24] |
ZHANG F, ZANG Y, HUANG D, et al. Flexible and self-powered temperature-pressure dual-parameter sensors using microstructure- frame-supported organic thermoelectric materials. Nat. Commun., 2015, 6: 8356.
DOI |
| [25] |
HAN X K, LU T Y, HUANG Y Y, et al. Supramolecular-reinforced hard-phase ionogels with exceptional mechanical robustness and damage tolerance. Adv. Mater., 2025, 37(41): e10713.
DOI URL |
| [1] | 李浩, 齐源, 高相东, 张星星, 王金敏. 溶胶凝胶水热法制备耐高温、隔热增强钙掺杂二氧化硅气凝胶[J]. 无机材料学报, 2026, 41(2): 262-272. |
| [2] | 李福平, 褚家宝, 仇海波, 党薇, 李晨曦, 赵康, 汤玉斐. SiO2纤维气凝胶的压缩回弹机理[J]. 无机材料学报, 2025, 40(9): 981-988. |
| [3] | 袁利萍, 吴袁泊, 俞佳静, 张世琰, 孙铱, 胡云楚, 范友华. 磷钼酸插层水滑石复合CNFs气凝胶的制备及其隔热保温性能[J]. 无机材料学报, 2025, 40(4): 415-424. |
| [4] | 张祥松, 刘业通, 王永瑛, 武子瑞, 刘振中, 李毅, 杨娟. 自组装制备PtIr合金气凝胶及其高效电催化氨氧化性能[J]. 无机材料学报, 2023, 38(5): 511-520. |
| [5] | 罗艺, 夏书海, 牛波, 张亚运, 龙东辉. 柔性有机硅气凝胶的制备及其高温无机化转变研究[J]. 无机材料学报, 2022, 37(12): 1281-1288. |
| [6] | 彭飞, 姜勇刚, 冯坚, 蔡华飞, 冯军宗, 李良军. 耐高温氧化铝气凝胶隔热复合材料研究进展[J]. 无机材料学报, 2021, 36(7): 673-684. |
| [7] | 张晓山, 王兵, 吴楠, 韩成, 吴纯治, 王应德. 高温隔热用微纳陶瓷纤维研究进展[J]. 无机材料学报, 2021, 36(3): 245-256. |
| [8] | 张泽,王晓栋,沈军. 气凝胶骨架结构的有机-无机交联度对其力学、热学性能的影响[J]. 无机材料学报, 2020, 35(4): 454-460. |
| [9] | 罗燚,冯军宗,冯坚,姜勇刚,李良军. 新型碳材料质子交换膜燃料电池Pt催化剂载体的研究进展[J]. 无机材料学报, 2020, 35(4): 407-415. |
| [10] | 柳凤琦, 冯坚, 姜勇刚, 李良军. 氮化硼气凝胶的制备及其应用进展[J]. 无机材料学报, 2020, 35(11): 1193-1202. |
| [11] | 丁卓峰, 杨永强, 李在均. 组氨酸功能化碳点/石墨烯气凝胶的制备及超级电容器性能[J]. 无机材料学报, 2020, 35(10): 1130-1136. |
| [12] | 吕子夜, 唐谊平, 曹华珍, 郑国渠, 侯广亚. V掺杂对Ni-Co-S/细菌纤维素基碳气凝胶电催化性能的影响[J]. 无机材料学报, 2020, 35(10): 1142-1148. |
| [13] | 朱召贤, 王飞, 姚鸿俊, 董金鑫, 龙东辉. 遮光剂掺杂Al2O3-SiO2气凝胶/莫来石纤维毡复合材料的高温隔热性能研究[J]. 无机材料学报, 2018, 33(9): 969-975. |
| [14] | 王勇, 于云, 冯爱虎, 江峰, 胡学兵, 宋力昕. Nafion改性多级孔径石墨烯气凝胶制备与性能研究[J]. 无机材料学报, 2018, 33(4): 469-474. |
| [15] | 杨景锋, 王齐华, 王廷梅. 氧化铝气凝胶的合成与性能[J]. 无机材料学报, 2018, 33(3): 259-265. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||